Примеры использования¶
Простые действия¶
view_params.py– просмотр параметровset_params.py– будут отображены текущие параметры, а затем предложено изменить значение любого из нихreboot.py– перезагрузка навигационного блокаshutdown.py– завершение работы навигационного блокаdownload_file.py– выгрузка карты из навигационного блока. Будет выведен список карт, хранящихся в памяти НБ, а затем будет предложено скачать любую из нихupload_file.py– загрузка карты в навигационный блок. Будет предложено ввести путь к файлу на локальной машине, затем — путь, по которому нужно сохранить файл в памяти НБdisable_vision.py– отключение вывода координат
Демонстрация режимов работы¶
Навигационный блок имеет параметр высота инициализации. После включения НБ сопособен выдавать только высоту над поверхностью, пока не достигнет высоты инициализации (параметр INIT_ALT). Во всех нижеприведённых примерах высота инициализации составляет 1 метр. Для вычисления высоты над поверхностью требуется информация о наклоне ЛА относительно горизонтального положения. Для упрощения приведённые скрипты сами генерируют сообщение ATTITUDE, считая углы наклона равными 0.
view_vision_position.py– отображение локальных координат. НБ будет настроен на режим навигации без карты и перезагружен при необходимости. Локальные координаты будут отображаться на экране.view_global_position.py– отображение глобальных координат. НБ будет настроен на режим навигации без карты и перезагружен при необходимости. Глобальные координаты будут отображаться на экране. Вычисление текщих глобальных координат производится относительно координат, заданных параметрами ORIGIN_LAT, ORIGIN_LON, ORIGIN_ALT, ORIGIN_HDGmapping_mode.py– построение карты. НБ будет настроен на режим навигации с сохранением карты. Локальные координаты будут отображаться на экране. Сохранение карты в файл произойдёт если в сообщении HEARTBEAT, поступающем на вход НБ, в поле base_mode флаг MAV_MODE_FLAG_SAFETY_ARMED перейдёт из состояния 1 в 0, что означает выключение двигателей, либо при перезагрузке или завершении работы.localization_mode.py– определение координат на построенной карте. НБ будет настроен на режим навигации с готовой картой. Локальные координаты будут отображаться на экране.
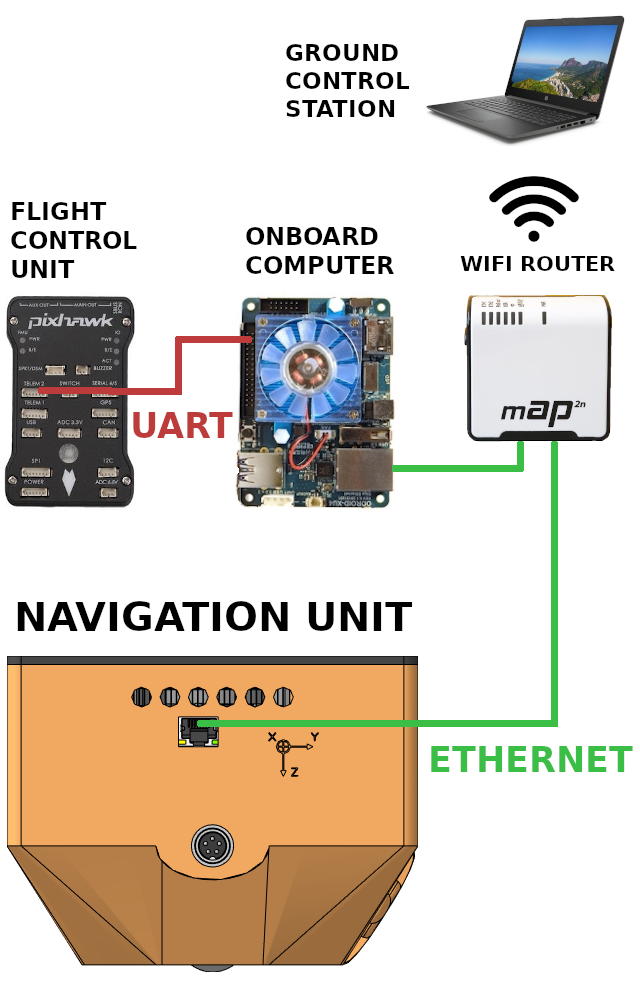
Соединение с полётным контроллером¶
Для данного примера необходимо установить MAVProxy.
Скрипт flight.bash запускает MAVProxy таким образом, чтобы обеспечить связь полётного контроллера с навигационным блоком и с наземной станцией.
После установления соединения с полётным контроллером, будет запущен скрипт pixhawk/mavinit.scr, который запросит у ПК сообщение ATTITUDE с частотой 20 Гц.